
Tarama Yöntemleri")
3 Boyutlu tarama (3d scan) için En çok tercih edilen 3 yöntem bulunur. Bu yöntemlerin seçimi projenize ve imkanlarınıza göre değişebilir.
Lazer 3B tarama
Lazer 3B tarama, en yaygın kullanılan 3B tarama tekniğidir. Bilinen lazer 3B tarayıcılar, bir lazerin bir nesneye çarpmasının ve geri gelmesinin ne kadar sürdüğünü ölçer.
Işığın hızı tam olarak bilindiğinden, lazerin tüm yolu geri gelmesi için geçen süre , 3B tarayıcı ile nesne arasındaki tam mesafeyi verir. Mesafeyi tam olarak ölçmek için 3D tarayıcı, milyonlarca lazer darbesini pikosaniyeye kadar doğrulukla hesaplar (1 pikosaniye, 0.000000000001 saniyeye eşittir!).
Her ölçü yalnızca bir nokta topladığı için, 3B tarayıcının lazerini bu noktanın etrafında 360 derece döndürmesi gerekir. Bunu yapmak için, 3B tarayıcıya genellikle lazerin yönünü değiştiren bir ayna takılır.
Bu lazer tarama tekniği, karmaşık geometrilerin ölçümü ve denetimi için mükemmeldir. Geleneksel yöntemlerle pratik olmayan yerden ölçüm ve veri alınmasını sağlar!
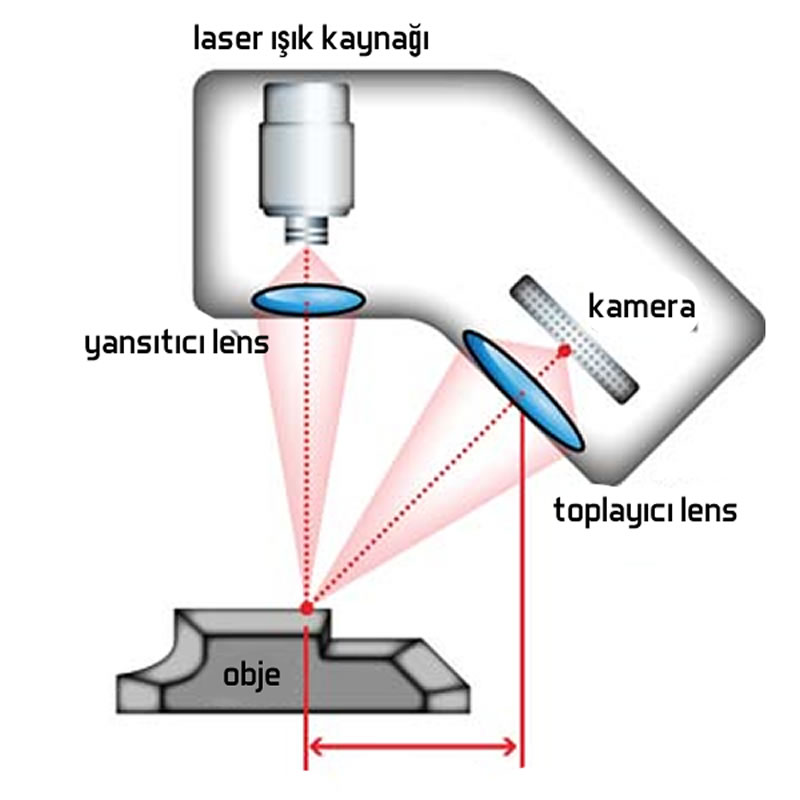
Lazer ışığı kullanan bir tarayıcı biraz kamera gibidir: yalnızca görüş alanında olanı yakalayabilir. Bu işlemle, cihazdan bir nesneye bir lazer noktası veya çizgisi yansıtılır ve bir sensör bu nesnenin yüzeyine olan mesafeyi ölçer.
Bu verileri işleyerek üçgenlenmiş bir ağa ve ardından bir CAD modeline dönüştürülebilir.
Lazer ile 3B tarama, tersine mühendislik için 3 Boyutlu dijital veri elde etmenin en hızlı, en doğru ve otomatik yoludur. Yine, özel yazılım kullanılarak, nokta bulutu verileri, parça geometrisinin 3B CAD modelini oluşturmak için kullanılır. CAD modeli, taranan nesnenin tam olarak yeniden üretilmesini sağlar veya nesne, kusurları düzeltmek için CAD modeli üzerinde değiştirilebilir. Lazer Tasarımı, uygulama için hangi sonuçlara ihtiyaç duyulursa, bir yüzey modeli veya daha karmaşık katı model sağlayabilir.
Yapılandırılmış Işık Taraması
Yapılandırılmış ışık tarayıcıları da trigonometrik üçgenleme kullanır, ancak lazer ışığına bakmak yerine, bu sistemler bir nesne üzerinde bir dizi doğrusal desen görüntülemek için bir projektör kullanır. Ardından, desendeki her çizginin kenarlarını inceleyerek tarayıcıdan nesnenin yüzeyine olan mesafeyi hesaplarlar. Esasen, kamera bir lazer çizgisi görmek yerine, yansıtılan desenin kenarını görür ve mesafeyi benzer şekilde hesaplar.

3D tarama için kullanılan yansıtılan yapılandırılmış ışık beyaz veya mavi olabilir ve Dijital Işık İşleme (DLP) teknolojisi gibi çeşitli projektör türleri tarafından oluşturulabilir. Yansıtılan model genellikle bir dizi ışık ışınıdır, ancak rastgele nokta matrisi de olabilir.
3D tarama için yapılandırılmış ışık teknolojisinin ana avantajları, hızı ve çözünürlüğüdür ve zararlı olmayan ışığı 3D vücut taraması için kullanılabilir.
Bununla birlikte, yapılandırılmış hafif 3D tarayıcılar, aydınlatma koşullarına duyarlıdır ve güpegündüz açık havada çalışmakta güçlük çekerler.
Yapılandırılmış ışık tarama işlemi, yüz veya çevre tanıma teknolojilerinde kullanılmaktadır.
Fotogrametri
Fotogrametri prensibi, statik bir öznenin farklı bakış açılarından çekilmiş birkaç fotoğrafını analiz etmek ve benzersiz bir fiziksel noktaya karşılık gelen pikselleri otomatik olarak tespit etmektir.
Bu 3B tarama teknolojisinin ana zorluğu, onlarca veya yüzlerce fotoğrafı ve binlerce noktayı yüksek doğrulukla incelemektir. Bu tür fotogrametri algoritmalarını çalıştırmak için çok güçlü bir bilgisayar gereklidir.
Fotogrametri 3B tarama teknolojisinin ana avantajları, yakalama hızı ve renkleri ve dokuları yakalama yeteneğidir. Fotogrametrik teknoloji aynı zamanda, örneğin bir drone ile yerden veya havadan fotoğraflanan manzaralar veya anıtlar gibi büyük ölçekli konuları yeniden oluşturma yeteneğine de sahiptir .
Bu 3D tarama teknolojisinin ana zorluğu, onlarca veya yüzlerce fotoğrafı ve binlerce noktayı yüksek doğrulukla incelemektir. Bu tür fotogrametri algoritmalarını çalıştırmak için çok güçlü bir bilgisayar gereklidir.
Fotogrametri teknolojisi ile üretilen sonuçların kalitesi, giriş fotoğraflarının çözünürlüğüne bağlıdır. Bu teknoloji, yazılımınıza ve bilgisayar kurulumunuza bağlı olarak oldukça yavaş olabilir.

Yukarıda 1912 yılında Atlantik sularına gömülen Titanic gemisinin batığını görüyoruz. Titanic batmadan önce iki parçaya ayrılmış ve parçalar yaklaşık 4000 metre derinlikte dibe batmıştı. Bu derinlikte bir batık geminin yukarıdaki gibi bir fotoğrafını çekmek imkansızdır. Çünkü o derinlikte suyun altı çok karanlıktır. Yukarıda gördüğünüz resim, fotogrametri yöntemiyle yani, geminin yakından çekilmiş binlerce fotoğrafının bilgisayar ortamında birleştirilerek 3 boyutlu model haline getirilmesiyle oluşmuştur.
Temas tabanlı 3B tarama teknolojisi
Temas tabanlı 3B tarama, sayısallaştırma olarak da bilinir . Bu 3B tarama teknolojisi, temasa dayalı bir 3B veri toplama biçimi anlamına gelir.
Temaslı 3B tarayıcılar, nesne sıkıca yerinde tutulurken nesneyi fiziksel dokunuşla inceler. 3B bilgileri kaydetmek için yüzey boyunca bir dokunma sondası hareket ettirilir. Prob bazen daha fazla hassasiyet için ilgili tüm konfigürasyonlarını ve açılarını toplayabilecek mafsallı bir kola takılır.
Temas tabanlı 3B tarayıcıların bazı özel yapılandırmalarına Koordinat Ölçüm Makineleri (CMM) adı verilir .
Temaslı 3B tarama, imalattan sonra veya bakım işlemleri sırasında kalite kontrolünü gerçekleştirmek için yaygın olarak kullanılmaktadır. 3B tarama için temas teknolojisinin ana avantajları, hassasiyeti ve şeffaf veya yansıtıcı yüzeyleri 3D tarama yeteneğidir .
Temaslı 3D tarama teknolojisinin dezavantajları, yavaşlığı ve organik, serbest biçimli şekillerle çalışamamasıdır.
Lazer 3B tarama başlığı altındaki bilgi yanlış. ışığın hhızını ölçmez orada. Mevcut da bulunan bir CMOS sensörü üzerinde interploasyon yaparak XZ hesaplar. Bunun için öncesinde Linear interpolasyon kalibrasyonu yapılması gerekir.